让仿人双足机器人(bipedal robots或者humanoid robots)自然地行走,绝对不是一件容易的事。比如前年的DARPA机器人大赛(DRC)上,能够看到各种机器人在面对各种任务时不幸摔倒的视频段子,甚至很多网友戏称,DRC应该是世界机器人跌跤大赛,因为有太多各种风格的摔倒,都是不带重样儿的。
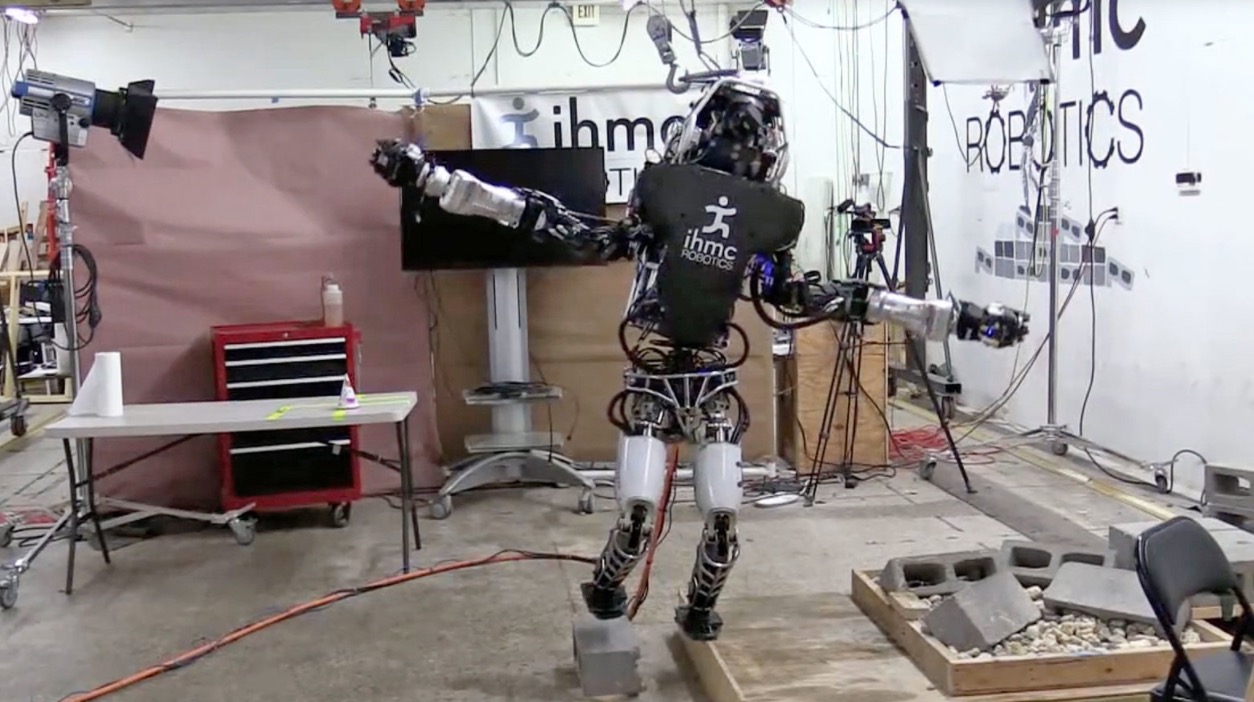
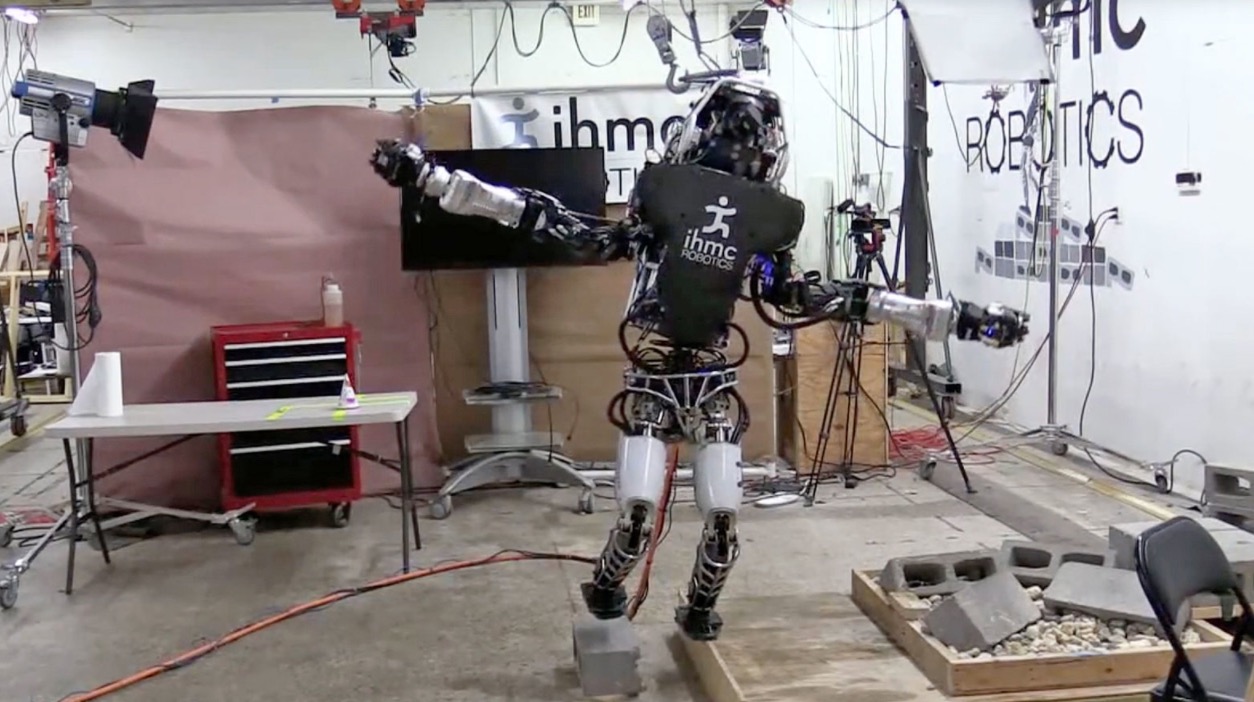
其中,波士顿动力曾经打造的仿人双足机器人ATLAS一直以来算是在行走方面发挥还不错的机器人。而波士顿动力的重要合作伙伴IHMC(佛罗里达人类和机器认知研究所)还专门为ATLAS机器人研发用于流畅行走的导航计算系统;去年,为了让这款接近于人类的机器人更好地应对复杂的行走环境,IHMC还特意发布视频称,它们已经成功让ATLAS的一条腿在一个接触面积非常小(仅3厘米厚)的竖板上,保持身体的平衡,这项实验也验证机器人可以比一个没经过平衡训练的人,更有能力控制好自己身体平衡的稳定性。
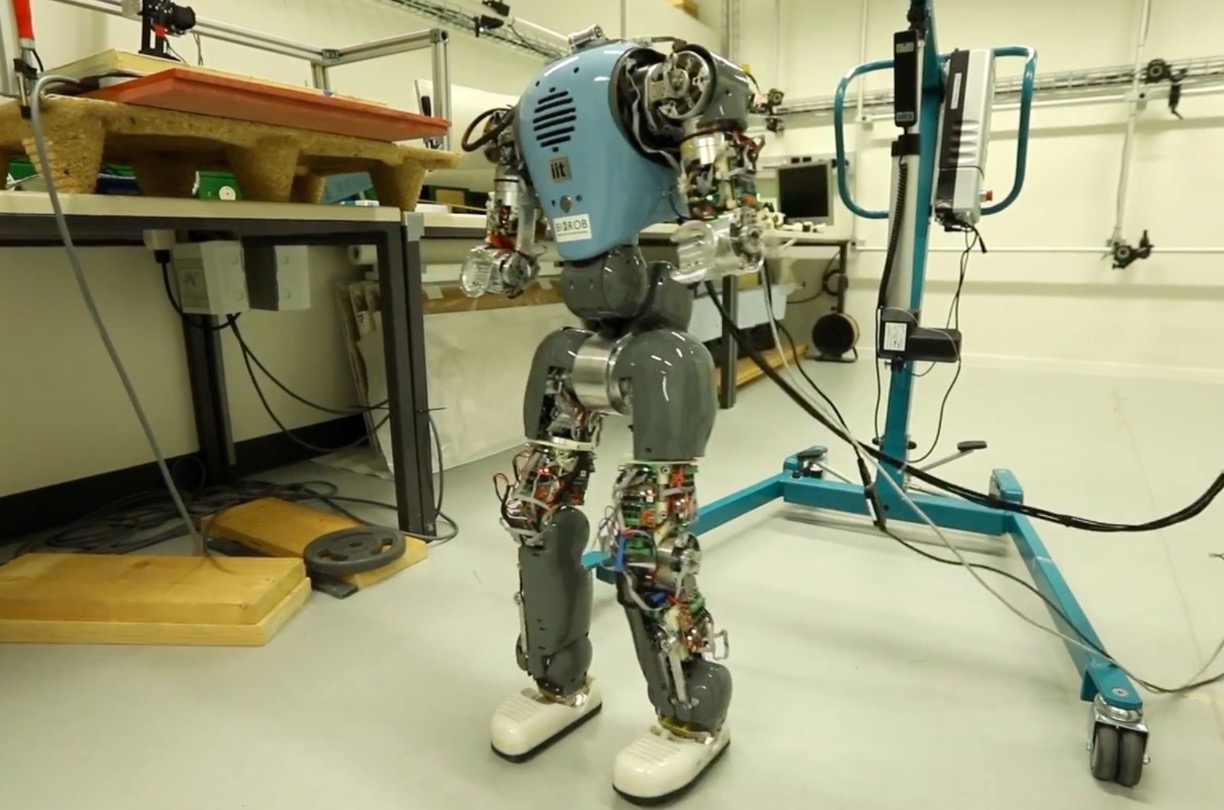
无独有偶,瑞士的一波来自COMAN(Compliant Humanoid)项目的研究人员,也希望致力于提高仿人双足机器人在行走时的平衡能力。简单地说,COMAN团队为了让机器人行走起来姿态更自然、稳定,他们将机械方面的柔性技术和控制算法做了一次深度集成,使之让机器人更“懂得”它们自己的身体。所以COMAN的机器人能通过感知当前的动力状态和自身结构,快速调节动作来掌握平衡。
目前,经过训练,COMAN机器人不仅可以稳定地迈步行走,还可以在上肢搬运物体时,或者行走在更复杂的道路上,也能自主掌握平衡,确保不会因为摔倒搞砸了正在执行的任务。团队的实验还指出,当外力故意以适当的力量对机器人进行推搡时,COMAN机器人同样可以尽其所能地调整自己的步调,使之保持身体的平衡。
不过,COMAN的平衡机器人仍处于研究状态,待其真正与市场应用相结合,团队说恐怕还得等上很长一段时间。比如目前,COMAN机器人还需要与很多代表了机器人大脑的其他感知设备进行融合,使之在可自主导航的前提下,保障能像人类那样完成一些简单的行动任务。
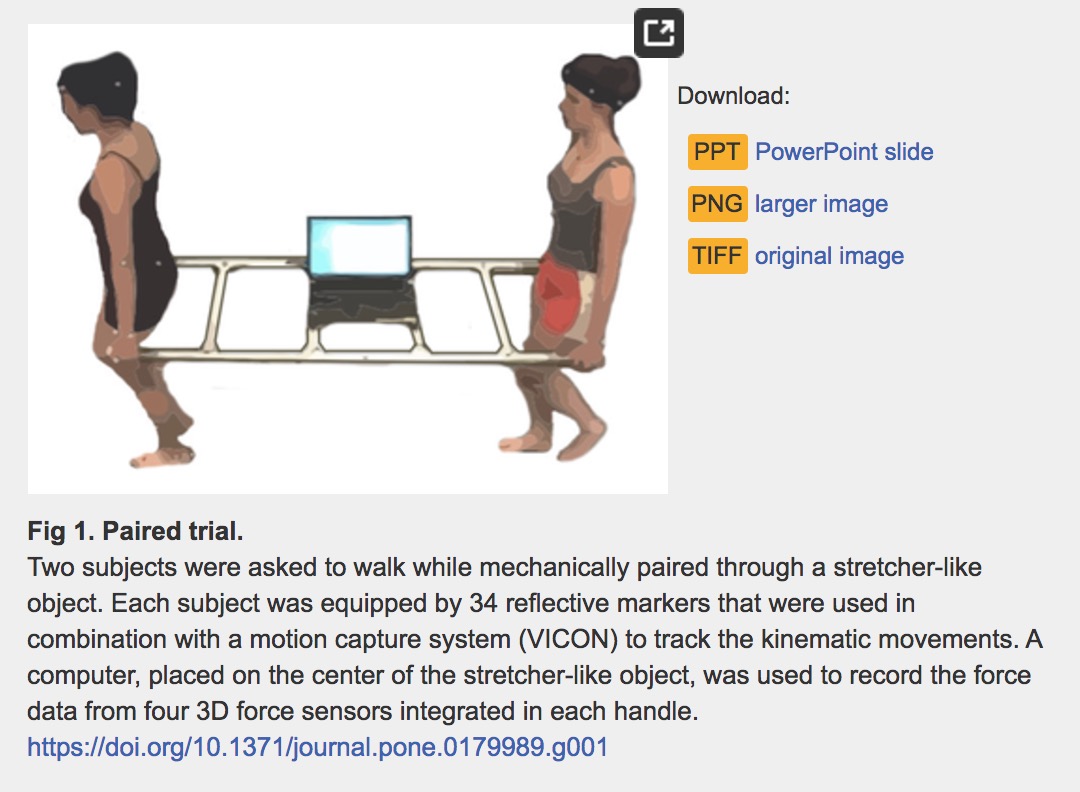
COMAN团队还在研究多机器人协同去完成某些更复杂的任务,正如两个以上的COMAN机器人,可以通过对动作的共享,保持动作整体的协调一致性和平衡性。比如接下来,两个COMAN机器人可以通过合作帮你把沙发从楼上搬到楼下,或者你可以和一个COMAN机器人合伙,搬起一张桌子并把他移动到一个适合的地方。
到时候,你在一个人忙不过来的体力劳动中,真的可以找一个COMAN机器人来帮你了。期待!